SAFE: Stable Alignment Finetuning with Entropy-Aware Predictive Control for RLHF
Paper
•
2602.04651
•
Published
•
1
None defined yet.

Lost in the Noise: How Reasoning Models Fail with Contextual Distractors
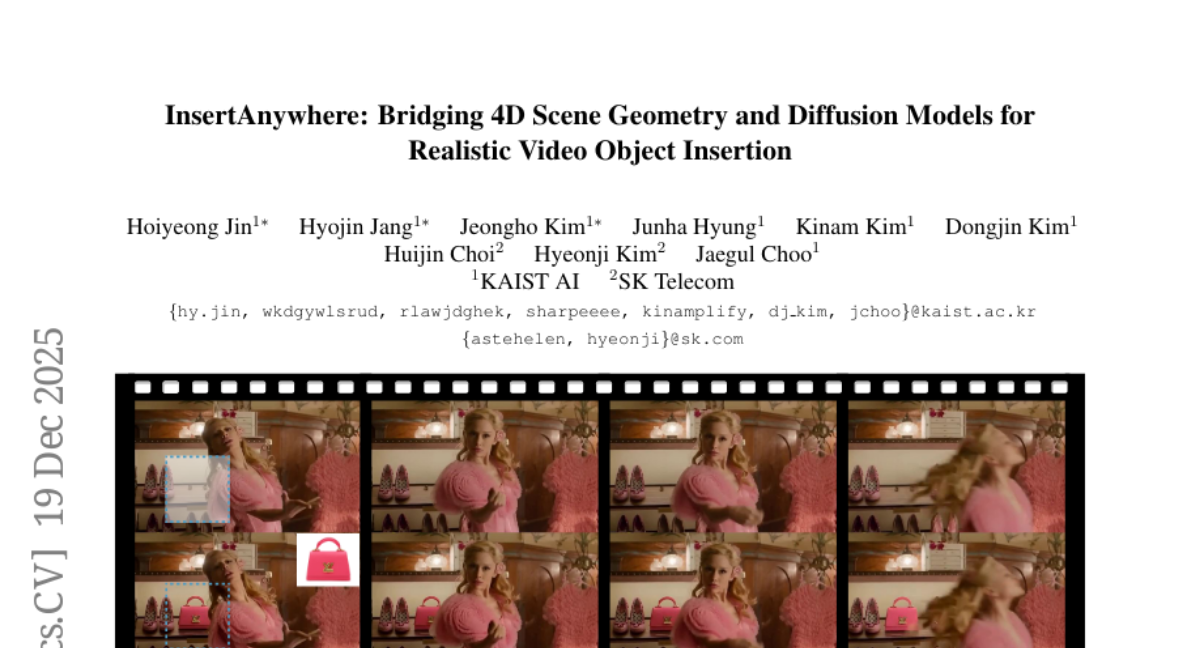
InsertAnywhere: Bridging 4D Scene Geometry and Diffusion Models for Realistic Video Object Insertion